编辑:www.itexam.com 来源:http://www.itexam.com
关键词:考试通知 阅读:6154
2018年石家庄初中信息技术考试说明
Ⅰ.考试指导思想
依据国家教育部颁布的《中小学信息技术课程指导纲要(试行)》及石家庄市教育局关于初中升学考试的若干实施意见,以教材为依托,以促进教学为目的,结合我市目前初中信息技术教学的实际情况,特制定石家庄市初中信息技术中考考试说明。
Ⅱ.考试环境
2018年初中信息技术学科升学考试继续采用“云考试”模式,学校通过接入石家庄市教育城域网直接在学生机上进行考试。软硬件环境及网络带宽要求如下:
(一)学生机配置
硬件:CPU主频2.0G或以上,内存2G或以上,10MB/100MB自适应网卡,C:盘可以写保护,但硬盘D:分区不能写保护,以暂存考生考试答题数据。
软件:中文Windows7操作系统,Office2003中文版(完全安装),Flash8中文版,格式工厂2.15多媒体处理软件。
(二)考务机配置:考务机与学生机配置相同。
(三)网络环境要求:普通学校(40台考试机),网络带宽不低于10M,设有多个考场的学校,网络带宽不低于20M。
Ⅲ.考试内容
考试命题内容原则以河北大学出版社《信息技术》第一册和第二册课本为主,涉及课本章节如下:
Ⅳ.考试题型及说明
一、考试题型
二、相关知识点
石家庄市教育信息化管理中心
2017年11月1日
附:机器人相关知识概述
一、走进机器人
1.机器人的定义:
机器人的定义:机器人(robot)是自动执行工作的机器装备。它既可以接受人类的指挥,又可以运行预先编排好的程序,也可以根据以人工智能技术制定的原则纲领行动。
1959年美国的英格伯格和德沃尔设计制造出世界上第一台工业机器人,被称为“尤尼梅特”。
2.机器人的分类:
从应用环境出发,将机器人分为两类:工业机器人和特种机器人。
工业机器人就是面向工业领域的多关节机械手或多自由度机器人。
特种机器人则是除工业机器人以外的,用于非制造业并服务于人类的各种先进机器人,包括:服务机器人、水下机器人、娱乐机器人、军用机器人、农业机器人、机器人化机器等……
3.机器人的组成:
机器人主要由传感器、控制器、执行器三部分组成。
机器人感受信息是通过各种不同类型的传感器(输入设备)来收集外部的信息,然后把信息传递给机器人的大脑——MCU,再通过它的执行器(输出设备)将动作和行为表现出来。
4.机器人的发展方向:
智能化是机器人的发展方向,智能机器人是具备一些与人或生物相似的智能能力,如感知能力,动作能力、规划能力和协同能力等,是“能自动工作的机器”。
智能机器人将是具有感知、思维和行动功能的机器。今后将融合机构学、自动控制、人工智能、微电子学、光学、通讯技术、传感技术、仿生学等多学科和技术的综合研究制造出不同功能的智能机器人。
二、组装机器人
1.制作一个教学机器人需要搭建它的物理框架、行动机构、逻辑控制机构,传感器、能源系统等多个方面。实验需要经历器材准备,模型搭建,电路连接,程序指令的编写,下载,检验等过程。把程序传输到电子产品的过程叫做下载。
2.两驱三轮车和两驱四轮车都是有两个驱动轮组成,不同的是一个是万向轮,另一个是从动轮。四驱四轮车的四轮都是由四个驱动轮组成,可以提供更强的动力和抓地力,广泛的被应用到越野汽车上;四个电机协同工作,如果速度不匹配将会造成失控、翻车等严重问题。
三、程序控制机器人
1.流程图
流程图是表示程序算法的一种方法。我们可以用程序控制机器人的动作,完成任务。
流程图定义:表示工作过程中事物各个环节进行顺序的简图。
流程图结构一般分为三种:顺序结构,分支结构(又称选择结构),循环结构。
2.传感器
传感器常见的有:接触传感器,红外传感器,温度传感器,磁体传感器(霍尔传感器),压力传感器,光敏传感器,火焰传感器等,可根据不同的条件触发传感器,控制电路状态,反馈信息。
红外传感器工作原理是利用红外光反射的原理实现的。首先每个红外线传感器上都有一个红外光发射管和一个红外光接受管,当红外光在发射过程中遇到浅色的物体后就会出现反射现象,光电管就是利用识别反射光的强度来判断出前面是否有障碍物的。如果前方没有物体或者是黑色物体,红外光将没有反射光线或反射光线极弱,不能触发传感器反馈信息,所以传感器认为前方没有障碍物。
温度传感器是能感应温度的传感器。
3.机器人基本程序设计
各种教学机器人不论是流程图式的模块编程,还是代码编程,设计思路都是一样的。
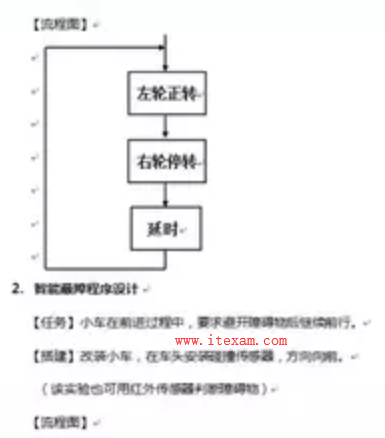
①简单程序设计
以两驱车为例,如果两个驱动轮等速前行,则小车直行,如果两轮不等速,小车会向左向右转动。通过设计可以使小车的轨迹走出圆形等形状。
例:【流程图】
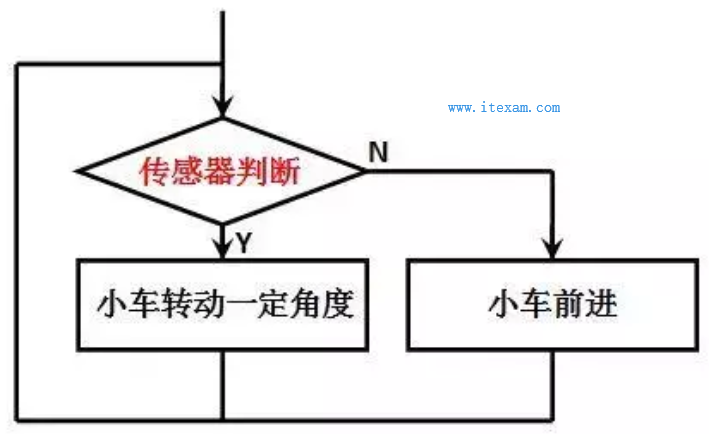
②智能避障程序设计
【任务】小车在前进过程中,要求避开障碍物后继续前行。
【搭建】改装小车,在车头安装碰撞传感器,方向向前。
(该实验也可用红外传感器判断障碍物)
【流程图】
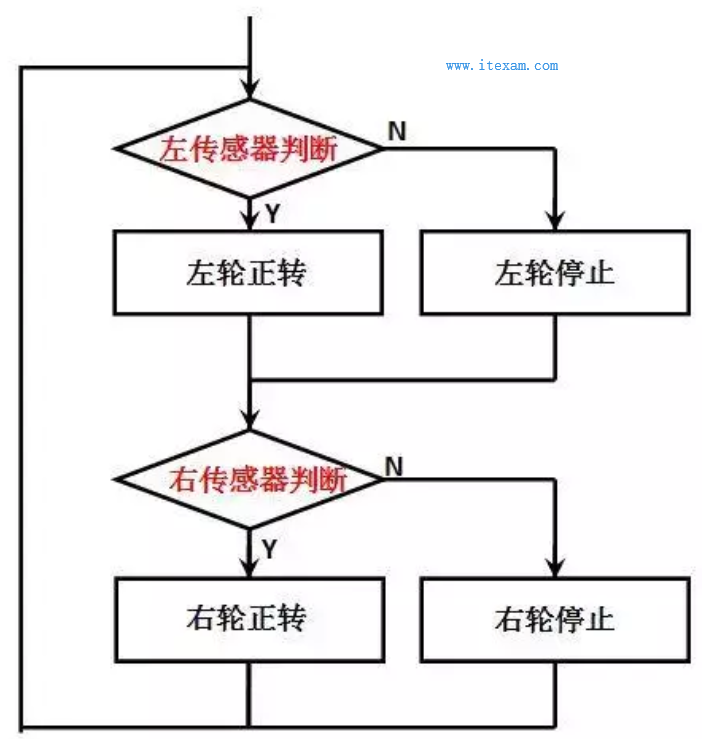
③智能循迹程序设计(巡黑线)
【任务】在一块白色的平面上有一条弯曲的黑色轨道,要求小车能沿着轨道前进,行驶过程中不停的纠正前进的方向。
【搭建】改装小车,在车头两侧装上2个反射型红外传感器,方向向下。
(2个传感器间距大于轨道宽度)
【流程图】
二、相关知识点
(一)选择题
3 考试范围为课本基础知识、机器人知识及相关常识等,原则上不涉及Office和Flash章节。
(二)基础多媒体题
1.Windows:文件(夹)的新建、重命名、移动、复制、删除、创建快捷方式。
2.WinRAR :文件(夹)的压缩,压缩包的解压缩。
3.多媒体题 :
图片文件转换格式、修改大小。
音频文件转换格式、截取一段音频、合并音频文件、MP3文件设置属性。
视频文件转换格式、截取一段视频、合并视频文件、视频文件提取声音。
(三)Word操作题
文字格式设置(包括表格内的文字):字体、字号、颜色、加粗、倾斜、下划线、文字底纹、字符间距、文字效果。
段落格式设置:对齐方式、左右缩进、首行缩进、悬挂缩进、段前段后间距、行距。
图片类对象(包括艺术字、图片、文本框):插入、设置、超链接。
表格格式设置:插入行/列,删除行/列,单元格对齐方式,设置内外边框的颜色、粗细,单元格的填充颜色。
其它操作:页面设置(上下左右边距、纸张大小和使用方向)、替换(只替换文本),分栏,页眉和页脚(插入并设置格式)。
(四)PowerPoint操作题
幻灯片的操作:添加、删除、隐藏幻灯片,交换幻灯片位置,幻灯片版式,背景(渐变——预设),幻灯片切换(切换效果,速度、声音、换页方式,应用范围)。
其他对象的操作:
文本框、图片、艺术字、自选图形(包括动作按钮)。
上述对象的插入,相关设置,自定义动画(动画效果,开始、方向、速度,声音),超级链接(相对位置与绝对位置)。
(五)Excel操作题
单元格格式设置:字体(字体、字号、加粗、倾斜、文字颜色),填充,边框(更改颜色),对齐(合并及居中、水平居中、跨列居中、垂直居中)。
公式(能够按照所给公式,写出相应Excel公式)
函数(求和、平均值、最大值、最小值)
图表:连续和不连续数据源,图表标题、分类轴和数值轴标题、保存在当前工作表。
其他操作:指定单元格输入,指定行/列的行高、列宽,工作表重命名,序列填充(等差数列填充,文本序列填充)。
(六)Flash操作题
舞台:属性(高、宽、背景色),导入(图片、声音)。
图层:插入、删除,重命名,更改位置,锁定/解锁,属性(引导层、被引导层、遮罩层、被遮罩层)。
帧:插入空白关键帧、关键帧、普通帧,复制、粘贴帧。
元件:新建元件(图形、影片剪辑),转换为元件。
实例(包括图形)对象:绘制、大小、移动位置、旋转角度、颜色(纯色和过渡色、Alpha值)。(包括:文字对象的输入、修改字体、字号和字色)
动画:运动动画,形状动画,引导线动画,遮罩层动画。
